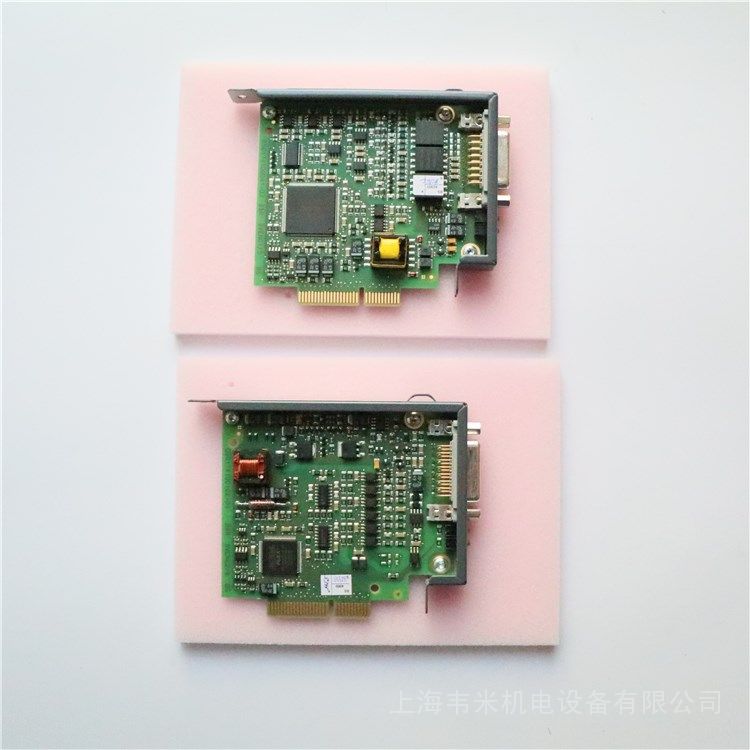
ؐ���R�ŷ����ƿ���8AC120.60-1��ؐ���RB&R����ʽģ�K���Ϻ��f�יC��O������˾���I�N�ۮaƷ��ԭ�Sԭ�b���|�����ϣ����\�gӭ���Ͽ͑���ԃُ�I��
���Ͼ�̖��
8AC120.60-1��
�f����
���b��ACOPOS�ŷ������е�EnDat 2.1���a���ӿ�
���a���O�y
Ҳ�m�����u�����ε�����ݔ����̖�������a��
ACOPOS���ģ�K��EnDat���a���������������a���ӿ�
�ŷ�ϵ�y*���Ǒ����ڴ������Ԅ��{��У���u�õ��ƏV��ő����ڙC���С�һ���^���������ŷ�ϵ�y��Ҫ����λ�C���ŷ��Ŵ������ŷ�늙C���ɣ�����Ҫ���c���nj��Cе�\���M�еĿ��ƞ鷴�����ƣ�Ҳ�����]�h���ơ��҂����f�Ĕ��ؙC���ŷ�ϵ�y�����M�o�ŷ�ϵ�y�����S�ŷ�ϵ�y��һ�����f���ŷ�ϵ�y���M�o�ŷ�ϵ�y���ŷ�늙C�ַQ���Lj���늙C�����ŷ�����ϵ�y����������Ԫ�����ѽ��յ������̖�D����늙C�S��λ�ƻ���ٶ�ݔ����������Ҫ���c�Ǯ�늉���̖����r�o���D�F��Ŀǰ�C����ʹ�õ�һ����m���ڵ���ƽ���\�Ј��ϵ�ͬ��늙C��
��ô�ŷ�ϵ�y����팍�F�]�h���Ƶ��أ��ŷ���Ҫ���}�_����λ�������Ͽ����@�����⣬�ŷ�늙C���յ�1���}�_���͕����D1���}�_�����ĽǶȣ��Ķ����Fλ�ƣ��ŷ�늙C�����߂�l���}�_�Ĺ��ܣ��ŷ�늙Cÿ���Dһ���Ƕȣ������l�������������}�_���@�ӣ����ŷ�늙C���յ��}�_�γ��˺�����Ҳ�����]�h�����һ����ϵ�y�͕�֪���l�˶����}�_�o�ŷ�늙C��ͬ�r�����˶����}�_�����@�Ӿ��܉�ܾ��_�Ŀ���늙C���D�ӣ��Ķ����F���_�Ķ�λ�������_��0.001mm���ŷ�늙C�ľ��țQ�����������a���ľ�����
�ŷ�늙C�c����늄әC��Ⱦ��І����D�ش��\�з����V���o���D�F����@�����c�������\�D���ŷ�늙C��ֻҪʧȥ����늉���늙C����ֹͣ�\�D���c���M늙C��Ⱦ��п��ƾ��ȸߡ����l�o���㹦��ݔ�����^�d�������]�h�������ܿɿ������ن�ͣ���ܺõ����c��ͬ�r�ŷ�ϵ�y���й������ƹ��ܣ��ɺ��w�Cе�Ą��Բ��㣬����ϵ�y�Ȳ������l�ʽ����C�ܣ��əz�y���Cе�Ĺ����c������ϵ�y�{����
ؐ���R�ŷ����ƿ���8AC120.60-1
ؐ���RACOPOS�����ŷ�����
ؐ���R�ŷ�����
8V1010.001-2
8V1010.00-2
8V1010.501-2
8V1010.50-2
8V1016.001-2
8V1016.00-2
8V1016.501-2
8V1016.50-2
8V1022.001-2
8V1022.00-2
8V1045.001-2
8V1045.00-2
8V1090.001-2
8V1090.00-2
8V1180.001-2
8V1180.00-2
8V128M.001-2
8V128M.00-2
8V1320.001-2
8V1320.00-2
8V1640.001-2
8V1640.00-2
ؐ���R����ʽģ�K
8AC110.60-2
8AC110.60-3
8AC112.60-1
8AC114.60-2
8AC120.60-1
8AC121.60-1
8AC122.60-3
8AC122.60-4
8AC123.60-1
8AC125.60-1
8AC125.60-2
8AC125.61-2
8AC126.60-1
8AC130.60-1
8AC131.60-1
8AC140.60-2
8AC140.60-3
8AC140.61-2
8AC140.61-3
8AC141.60-2
8AC141.61-3
ؐ���R��|����������|��朣�
ؐ���R0.75 mm2 늙C��|
8CM003.12-0
8CM005.12-0
8CM006.12-0
8CM007.12-0
8CM009.12-0
8CM010.12-0
8CM012.12-0
8CM014.12-0
8CM015.12-0
8CM020.12-0
8CM025.12-0
ؐ���R1.5 mm2 늙C��|
8CM001.12-1
8CM002.12-1
8CM003.12-1
8CM004.12-1
8CM005.12-1
8CM006.12-1
8CM007.12-1
���b�O��,�����ڮaƷ���a������ć�(��)���a���ڡ���ڡ��sĤ��
��Ҫ���������b�C�����b�C����ڙC����a�C������C����ՙC���տs�C����հ��b�C���Q�ذ��b�C�ȡ�
���b�C���ò�ɫ�|�����ͷ����ɿ����p�S�߾���ݔ����PLC���ơ��ƴ���Ӌ���������ϡ���a���д�һ������ɡ�
�����Ú�·���ƺ��·���ƪ������x������С�����ܷ�����
�����pƤ���ŷ���ģ���p�ŷ����ƣ������٣����b�����ͺã������^�����F�߾��ȶ�λ���ߴ�ʴ_��
���b�C�ķN��࣬������ܶࡣ�IJ�ͬ���^�c���l���ж�N�����Cе�N֞飺Һ�w���b�C���ۄ����b�C���w�����b�C���N�w���b�C���u��b�C����ӽM�ϳӰ��b�C����ʽ���b�C�������b���÷֣��ЃȰ��b��������b�C�������b�ИI�֣���ʳƷ�����û���������Ʒ�Ȱ��b�C�������b��λ�֣��Іι�λ���λ���b�C�����Ԅӻ��̶ȷ֣��а��Ԅӡ�ȫ�ԄӰ��b�C�ȡ�
���b�C�ķN��࣬������ܶࡣ�IJ�ͬ���^�c���l���ж�N�����Cе�N֞飺Һ�w���b�C���ۄ����b�C���w�����b�C���N�w���b�C���u��b�C����ӽM�ϳӰ��b�C����ʽ���b�C�������b���÷֣��ЃȰ��b��������b�C�������b�ИI�֣���ʳƷ�����û���������Ʒ�Ȱ��b�C�������b��λ�֣��Іι�λ���λ���b�C�����Ԅӻ��̶ȷ֣��а��Ԅӡ�ȫ�ԄӰ��b�C�ȡ�
ȫ�Ԅ��w�����b�C
ȫ�Ԅ��w�����b�C
��հ��b�C�������b��ķ���λ�ò�ͬ����ˮƽ��հ��b�C�ʹ�ֱ��հ��b�C��ˮƽ��հ��b�C�ı����b����ˮƽ���ã���ֱ��հ��b�C�ı����b���Ǵ�ֱ���á�ˮƽ��հ��b�C���Ј��ϸ���Ҋ��
��Ĥ���S���b�C
��Ҫ���ڸ��N�ЮaƷ����Ĥ���S���b,Ч�����㟟����һ��Ư��,���й���ʡ�,���bЧ�����������c.
����C
����C�nj������İ��bƷ�b�뵽���N�����ȵİ��b�C������Ҫ�N��У�
�ݷeʽ����C����������ʽ�����ʽ������ʽ����λʽ���ݗUʽ�����rʽ����C��
�Q��ʽ����C�������gЪ�Q��ʽ���B�m�Q��ʽ���Q��—�x�ĵȷ�ʽ�ȳ���C��
Ӌ��ʽ����C�������μ�Ӌ��ʽ�����Ӌ��ʽ����C��
��ڙC
��ڙC�nj������а��b��������M�з�ڵęCе������Ҫ�N��У�
�o��ڲ��Ϸ�ڙC�������ቺʽ���䉺ʽ���ۺ�ʽ�����ʽ���ۯBʽ�ȷ�ڙC��
�з�ڲ��Ϸ�ڙC����������ʽ���L�yʽ����߅ʽ������ʽ�ȷ�ڙC��
���o����ڲ��Ϸ�ڙC�������z��ʽ��ճ�Yʽ��ᔺ�ʽ���Y��ʽ���p��ʽ�ȷ�ڙC��
�����C
�����C�������Եİ��b���ϣ�ȫ���ֵ،����b����������İ��b�C������Ҫ�N��У�
ȫ��ʽ�����C������Ť�Yʽ�����wʽ���N�wʽ���ӿpʽ�ȹ��C��
���ʽ�����C�������ۯBʽ���տsʽ������ʽ���p�@ʽ�ȹ��C��
��ܰ��b�C
�@��b�C���ЃɷN��ɷN���ϵĹ��ܡ�����Ҫ�N��У�
�����ڙC�������г����ڃɷN���ܡ�
���ͳ����ڙC�������г��͡����������N���ܡ����͵ķN��д����͡�ƿ���͡���г��͡����ֳ��͡����ڳ��͵ȡ�
���ͳ����ڙC�������ж��͡������ڹ��ܡ����ͷ�ʽ
�p�����C������ͬ�r�����w���µ׃ɂ��档����r�����ӿɂȷŻ����š�
�տs���b�C
�տs���b�C�����տs�^���У���Ӱ푰��b���Ʒ�|�������տs�������������b��ĮaƷ���ܷ⡢��������ײ�����m���ڶ����Ʒ�o���b���бP���b��
���տs���b�C������PLC���|����ȫ�Ԅ���X���ƣ����Ҿ��ПoĤ�������ϵK����
�;��տs���b�C���Dz;��տs���b�C,
����տs���b�C����ᘌ��T�塢������Ȱ����տs���b�OӋ��,�m�����κ��տs��Ĥ���տs���b
ʳƷ�տs���b�C���������p����ʳƷ����ϡ��ǹ����Ļ���Ʒ����ˇ���g����ߡ����ð�؛��������Ʒ��
�h�t�⾀�տs�C�����b�����Ʒ���ܷ⡢����������Ⱦ�����o��Ʒ�����ⲿ�ě_��������һ���ľ��_�ԣ��V�����ڸ��NС�aƷ�İ��b��
ACOPOSinverter
׃�l��
�����cЧ����Y��-��߹��I�Cе����-ͨ�^�p���ܺIJ����;S�o�ɱ�������ϵ�y��������
ACOPOSinverterP74
ACOPOSinverterP74��һ���m�������ஐ��늙C��ͬ��늙C��׃�l�����Դ늉���200��500V���~�����ʏ�0.18��15kW��ACOPOSinverterP74�͟o���a��ͬ��늙C�ĽM�ϘO��o��������������@���pС�C�������w�ߴ磬��������ɱ���
����
���ϰ��\��С�͂��͎��������C�ȣ�
���b�Cе��С���N�˙C��С���ƴ��C�ȣ�
���ÙCе����͙C����ϙC�������Cе�ȣ�
����s�C���L��
؛�������C
ľ�ļӹ����Ԅ�܇����䏴���㊴��ȣ�
���ټӹ��Cе���ۏ��C�����әC���и�C�ȣ�
����
�Ƅӿ���
ؓ�d����
��λ�_�P����
�������
Ť�ؿ���
�����O���ГQ
늙C�ГQ
PID������
ͨ�^�D�ٙz�y�����Ԅӌ��R���Dؓ�d(�\�Еr���R)
Ƿ������
�������
ACOPOSinverterP84
ACOPOSinverterP84��һ���m�������ஐ��늙C��׃�l�����Դ늉���200��480V���~�����ʏ�0.37��75kW��
�{����V�������ܷ����ͱ��༯�ɵĹ��ܣ�ACOPOSinverterP84���ԝM����s�C�����̵�Ҫ��
����
���ϰ��\���a��C/ж��C�����͎��������O��ȣ�
���b��������b�C���N�˙C�ȣ�
�����������C������C��ϴ��C��Óˮ�C������C�ȣ�
ľ�ļӹ����Ԅ�܇����䏴���㊴���
�ߑT�����x�ęC������C���nj��Q�Cе�����ͱã��_�����ȣ�
����ϵ�y/���ϰ��\
����
�Ƅӿ���
ؓ�d����
��λ�_�P����
�������
Ť�ؿ���
�����O���ГQ
늙C�ГQ
PID������
ͨ�^�D�ٙz�y�����Ԅӌ��R���Dؓ�d(�\�Еr���R)
Ƿ������
�������
ؐ���RACOPOS
ؐ���R�ŷ�����
8V1010.001-2
8V1010.00-2
8V1010.501-2
8V1010.50-2
8V1016.001-2
8V1016.00-2
8V1016.501-2
8V1016.50-2
8V1022.001-2
8V1022.00-2
8V1045.001-2
8V1045.00-2
8V1090.001-2
8V1090.00-2
8V1090.00-1
8V1180.001-2
8V1180.00-2
8V128M.001-2
8V128M.00-2
8V1320.001-2
8V1320.00-2
8V1640.001-2
8V1640.00-2
ؐ���RACOPOS P3
ؐ���RSafeMOTION 3�Sģ�K
8EI2X2HWTS0.XXXX-1
8EI2X2MWTS0.XXXX-1
8EI4X5HWTS0.XXXX-1
8EI4X5MWTS0.XXXX-1
8EI8X8HWTS0.XXXX-1
8EI8X8MWTS0.XXXX-1
ؐ���RSafeMOTION 2�Sģ�K
8EI2X2HWDS0.XXXX-1
8EI2X2MWDS0.XXXX-1
8EI4X5HWDS0.XXXX-1
8EI4X5MWDS0.XXXX-1
8EI8X8HWDS0.XXXX-1
8EI8X8MWDS0.XXXX-1
ؐ���RSafeMOTION 1�Sģ�K
8EI1X6HWSS0.XXXX-1
8EI1X6MWSS0.XXXX-1
8EI2X2HWSS0.XXXX-1
8EI2X2MWSS0.XXXX-1
8EI4X5HWSS0.XXXX-1
8EI4X5MWSS0.XXXX-1
8EI8X8HWSS0.XXXX-1
8EI8X8MWSS0.XXXX-1
ؐ���R3�Sģ�K
8EI2X2HWT10.XXXX-1
8EI2X2MWT10.XXXX-1
8EI4X5HWT10.XXXX-1
8EI4X5MWT10.XXXX-1
8EI8X8HWT10.XXXX-1
8EI8X8MWT10.XXXX-1
ؐ���R2�Sģ�K
8EI2X2HWD10.XXXX-1
8EI2X2MWD10.XXXX-1
8EI4X5HWD10.XXXX-1
8EI4X5MWD10.XXXX-1
8EI8X8HWD10.XXXX-1
8EI8X8MWD10.XXXX-1
ؐ���R1�Sģ�K
8EI013HWS10.XXXX-1
8EI017HWS10.XXXX-1
8EI1X6HWS10.XXXX-1
8EI1X6MWS10.XXXX-1
8EI2X2HWS10.XXXX-1
8EI2X2MWS10.XXXX-1
8EI4X5HWS10.XXXX-1
8EI4X5MWS10.XXXX-1
8EI8X8HWS10.XXXX-1
8EI8X8MWS10.XXXX-1
ؐ���RACOPOS multi
ؐ���R��׃ģ�K�����Sģ�K��
ؐ���R��Ȱ��b
8BVI0014HWS0.000-1
8BVI0028HWS0.000-1
8BVI0055HWS0.000-1
8BVI0110HWS0.000-1
8BVI0220HWS0.000-1
8BVI0330HWS0.000-1
8BVI0440HWS0.000-1
8BVI0660HWS0.000-1
8BVI0880HWS0.004-1
8BVI1650HWS0.000-1
ؐ���R��s���ʽ���b
8BVI0014HCS0.000-1
8BVI0028HCS0.000-1
8BVI0055HCS0.000-1
8BVI0110HCS0.000-1
8BVI0220HCS0.000-1
8BVI0330HCS0.000-1
8BVI0440HCS0.000-1
8BVI0660HCS0.000-1
8BVI0880HCS0.004-1
8BVI1650HCS0.000-1
ؐ���R��׃ģ�K��SafeMOTION�����Sģ�K��
ؐ���R��Ȱ��b
8BVI0014HWSA.000-1
8BVI0014HWSS.000-1
�ŷ������ַQ��“�ŷ�������”��“�ŷ��Ŵ���”������ԭ�����Á������ŷ�늙C��һ�N�������������������׃�l����������ͨ�����R�_�������ŷ�ϵ�y��һ���֣���Ҫ�����ڸ߾��ȵĶ�λϵ�y��һ����ͨ�^λ�á��ٶȺ��������N��ʽ���ŷ�늙C�M�п��ƣ����F�߾��ȵĂ���ϵ�y��λ��Ŀǰ�ǂ��Ӽ��g�ĸ߶ˮaƷ��
PLCݔ����ֻ�Ƿ�����������ݔ���������Ҳ������������PLC���}�_���ŷ������Ĺ���ָ��ŷ����������������һ���ܝM���ŷ�늙C�����Ľ����Դ�������ŷ�늙C�r������ֱ�Ӱ�PLC���}�_���ηŴ���������@Щ�}�_����ʲô�ģ�Ȼ��ͨ�^PWM��ʽģ�Mݔ�����Ҳ��������ŷ�늙C������
һ��PLC�l�}�_����PLS�}�_�������}�����g���ǹ̶��ķ������@�������Ă��������������“����”������һ���}�_�����ŷ�늙CҪ��“һ��”�������D�Ӷ��ٽǶȣ��������}�_��������Խ�࣬�ŷ�늙C�D�ӵĽǶȾ͌���Խ�࣬�����ŷ�������Ҫݔ�����ŷ�늙C�D�Ӷ��ٽǶȵIJ����ˣ������ŷ�늙C�o�����M늙C�ǘӁ���늙C�Y����������ˣ�����Ҫ�Ђ�λ�íh�����]�h��Ҳ���ǿ����a�����}�_�y����ǰ��늙C�D��׃���˶��٣�Ȼ����ͨ�^PID���{��ݔ��늉���ݔ���l���ˡ�
Ҳ�����ŷ�����Ҫ�ѽ��ܵ���PLC�}�_��늙C�������ľ��a���}�_�����^�����Ժ�����������p����Ȼ���^PIDӋ���ݔ��һ��ֵ���ٽo�����^�ٶȭh������h����Ӌ�㣬*��ͨ�^PWM�ֶ�����IGBTģ�K��ݔ��һ��������ģ�M���Ҳ������ŷ�늙C���D�ف�M����Ҫ�D�ӵ�ʲô�Ƕ�λ�á��ĵӵĽǶȁ������ŷ������Ŀ��ƺ�ʸ��׃�l���Ŀ����Dz��ġ�