ؐ���RB&R����ʽģ�K8AC131.60-1���Ϻ��f�יC(j��)��O(sh��)������˾���I(y��ng)�N�ۮa(ch��n)Ʒ��ԭ�Sԭ�b���|(zh��)�����ϣ����\(ch��ng)�gӭ���Ͽ͑���ԃُ(g��u)�I��
���Ͼ�̖(h��o)��
8AC131.60-1��
�f����
���ڰ��b��ACOPOS�ŷ��(q��)��(d��ng)���еĻ��ģ�K
2��(g��)ģ�Mݔ�룬12λ�ֱ��ʣ�*��2��(g��)��(sh��)��ݔ��/ݔ��
�ɆΪ�(d��)�ГQ��ݔ��/ݔ��
Ӌ(j��)��(sh��)������
���xȡ���Д�(sh��)��ݔ��
ACOPOS���ģ�K��2��(g��)ģ�Mݔ��±10 V��2��(g��)��(sh��)��I/O�������Þ�24 Vݔ���ݔ��45 mA���Ϊ�(d��)ӆُ(g��u)�Ӿ���TB712��
��(sh��)��܇�����Q����(du��)����C(j��)е�ӹ�������Є��r(sh��)�������x����������Ҳ�Ĵ������˴��������߾��ȡ��߷�(w��n)���Եĵ�·����(sh��)�ؙC(j��)�������н��������O(sh��)���е�ռ�ȣ��Ǻ������Ԅ�(d��ng)��ˮƽ����Ҫ����(sh��)��
܇���������н��ټӹ��C(j��)����ĸ�C(j��)����1797��Ӣ��(gu��)�C(j��)е�l(f��)����ĪƝ����(chu��ng)�����ýz�܂���(d��ng)���ܵĬF(xi��n)��܇���ԁ�������(j��ng)��Խ��210����Ěvʷ��*�����M(j��n)�˙C(j��)е�ӹ��I(y��)�İl(f��)չ����(gu��)�H��܇���İl(f��)չ��(j��ng)�v�ˏ���ͨ܇����Һ�����Ԅ�(d��ng)���Ԅ�(d��ng)��������(sh��)�ػ���ֱ���������ܻ����W(w��ng)�j(lu��)���İl(f��)չ�v�̣��C(j��)���c�˵��P(gu��n)ϵҲ׃��Խ��Խ��(ji��n)�����������쾚�̶ȱ��C�����|(zh��)�����Hݔ�딵(sh��)�س���Ϳɫ@�ø��|(zh��)������Ч�ʵĮa(ch��n)Ʒ��܇��׃��Խ��Խ���Ի������m��(y��ng)���r�h(hu��n)������ˇҪ��*�����h(hu��n)���ȷ��涼�����ˬF(xi��n)�����á�
�ŷ��(q��)��(d��ng)���ַQ��“�ŷ�������”��“�ŷ��Ŵ���”������ԭ�����Á������ŷ�늙C(j��)��һ�N�������������������׃�l����������ͨ�����R�_(d��)�������ŷ�ϵ�y(t��ng)��һ���֣���Ҫ��(y��ng)���ڸ߾��ȵĶ�λϵ�y(t��ng)��һ����ͨ�^λ�á��ٶȺ��������N��ʽ��(du��)�ŷ�늙C(j��)�M(j��n)�п��ƣ���(sh��)�F(xi��n)�߾��ȵĂ���(d��ng)ϵ�y(t��ng)��λ��Ŀǰ�ǂ���(d��ng)���g(sh��)�ĸ߶ˮa(ch��n)Ʒ��
PLCݔ����ֻ�Ƿ��������(q��)��(d��ng)��ݔ���������Ҳ������������PLC���}�_���ŷ��(q��)��(d��ng)���Ĺ���ָ��ŷ��(q��)��(d��ng)�������������һ��(g��)�ܝM���ŷ�늙C(j��)�����Ľ����Դ�����(q��)��(d��ng)�ŷ�늙C(j��)�r(sh��)������ֱ�Ӱ�PLC���}�_��(ji��n)�ηŴ���������@Щ�}�_����ʲô�ģ�Ȼ��ͨ�^PWM��ʽģ�Mݔ�����Ҳ��������ŷ�늙C(j��)������
һ��PLC�l(f��)�}�_����PLS�}�_�������}�����g���ǹ̶��ķ������@��(g��)�����Ă�(g��)��(sh��)�����������“����”������һ��(g��)�}�_�����ŷ�늙C(j��)Ҫ��“һ��”�������D(zhu��n)��(d��ng)���ٽǶȣ��������}�_������(g��)��(sh��)Խ�࣬�ŷ�늙C(j��)�D(zhu��n)��(d��ng)�ĽǶȾ͌�(du��)��Խ�࣬�����ŷ��(q��)��(d��ng)����Ҫݔ�����ŷ�늙C(j��)�D(zhu��n)��(d��ng)���ٽǶȵIJ����ˣ������ŷ�늙C(j��)�o�����M(j��n)늙C(j��)�ǘӁ���늙C(j��)�Y(ji��)��(g��u)��(ji��n)������ˣ�����Ҫ�Ђ�(g��)λ�íh(hu��n)�����]�h(hu��n)��Ҳ���ǿ����a�����}�_�y(c��)����(d��ng)ǰ��늙C(j��)�D(zhu��n)��׃���˶��٣�Ȼ����ͨ�^PID���{(di��o)��ݔ��늉���ݔ���l���ˡ�
Ҳ�����ŷ��(q��)��(d��ng)��Ҫ�ѽ��ܵ���PLC�}�_��늙C(j��)�������ľ��a���}�_�����^�����Ժ�(ji��n)����������p����Ȼ��(j��ng)�^PIDӋ(j��)���ݔ��һ��(g��)ֵ���ٽo�����^�ٶȭh(hu��n)������h(hu��n)����Ӌ(j��)�㣬*��ͨ�^PWM�ֶ�����IGBTģ�K��ݔ��һ��������ģ�M���Ҳ������ŷ�늙C(j��)���D(zhu��n)�ف�M����Ҫ�D(zhu��n)��(d��ng)��ʲô�Ƕ�λ�á��ĵӵĽǶȁ������ŷ��(q��)��(d��ng)���Ŀ��ƺ�ʸ��׃�l���Ŀ����Dz��ġ�
ؐ���RB&R����ʽģ�K8AC131.60-1
ؐ���R����ʽģ�K
8AC110.60-2
8AC110.60-3
8AC112.60-1
8AC114.60-2
8AC120.60-1
8AC121.60-1
8AC122.60-3
8AC122.60-4
8AC123.60-1
8AC125.60-1
8AC125.60-2
8AC125.61-2
8AC126.60-1
8AC130.60-1
8AC131.60-1
8AC140.60-2
8AC140.60-3
8AC140.61-2
8AC140.61-3
8AC141.60-2
8AC141.61-3
ؐ���RACOPOS
ؐ���R�ŷ��(q��)��(d��ng)��
8V1010.001-2
8V1010.00-2
8V1010.501-2
8V1010.50-2
8V1016.001-2
8V1016.00-2
8V1016.501-2
8V1016.50-2
8V1022.001-2
8V1022.00-2
8V1045.001-2
8V1045.00-2
8V1090.001-2
8V1090.00-2
8V1090.00-1
8V1180.001-2
8V1180.00-2
8V128M.001-2
8V128M.00-2
8V1320.001-2
8V1320.00-2
8V1640.001-2
8V1640.00-2
ؐ���RACOPOS P3
ؐ���RSafeMOTION 3�Sģ�K
8EI2X2HWTS0.XXXX-1
8EI2X2MWTS0.XXXX-1
8EI4X5HWTS0.XXXX-1
8EI4X5MWTS0.XXXX-1
8EI8X8HWTS0.XXXX-1
8EI8X8MWTS0.XXXX-1
ؐ���RSafeMOTION 2�Sģ�K
8EI2X2HWDS0.XXXX-1
8EI2X2MWDS0.XXXX-1
8EI4X5HWDS0.XXXX-1
8EI4X5MWDS0.XXXX-1
8EI8X8HWDS0.XXXX-1
8EI8X8MWDS0.XXXX-1
ؐ���RSafeMOTION 1�Sģ�K
8EI1X6HWSS0.XXXX-1
8EI1X6MWSS0.XXXX-1
8EI2X2HWSS0.XXXX-1
8EI2X2MWSS0.XXXX-1
8EI4X5HWSS0.XXXX-1
8EI4X5MWSS0.XXXX-1
8EI8X8HWSS0.XXXX-1
8EI8X8MWSS0.XXXX-1
ؐ���R3�Sģ�K
8EI2X2HWT10.XXXX-1
8EI2X2MWT10.XXXX-1
8EI4X5HWT10.XXXX-1
8EI4X5MWT10.XXXX-1
8EI8X8HWT10.XXXX-1
8EI8X8MWT10.XXXX-1
ؐ���R2�Sģ�K
8EI2X2HWD10.XXXX-1
8EI2X2MWD10.XXXX-1
8EI4X5HWD10.XXXX-1
8EI4X5MWD10.XXXX-1
8EI8X8HWD10.XXXX-1
8EI8X8MWD10.XXXX-1
���I(y��)�C(j��)�����ǏV�����ڹ��I(y��)�I(l��ng)��Ķ��P(gu��n)��(ji��)�C(j��)е�ֻ�����ɶȵęC(j��)���b�ã�����һ�����Ԅ�(d��ng)�ԣ������������Ą�(d��ng)����Դ�Ϳ���������(sh��)�F(xi��n)���N���I(y��)�ӹ����칦�ܡ����I(y��)�C(j��)���˱��V����(y��ng)������ӡ������������ȸ���(g��)���I(y��)�I(l��ng)��֮�С�
һ����f�����I(y��)�C(j��)��������������(g��)��ϵ�y(t��ng)�M�ɡ�
�����ǙC(j��)е���֡����в��ֺͿ��Ʋ��֡�
����(g��)��ϵ�y(t��ng)�ɷ֞�C(j��)е�Y(ji��)��(g��u)ϵ�y(t��ng)���(q��)��(d��ng)ϵ�y(t��ng)����֪ϵ�y(t��ng)���C(j��)����-�h(hu��n)������ϵ�y(t��ng)���˙C(j��)����ϵ�y(t��ng)�Ϳ���ϵ�y(t��ng)��
1.�C(j��)е�Y(ji��)��(g��u)ϵ�y(t��ng)
�ęC(j��)е�Y(ji��)��(g��u)���������I(y��)�C(j��)���˿��w�Ϸ֞鴮(li��n)�C(j��)���˺Ͳ�(li��n)�C(j��)���ˡ���(li��n)�C(j��)���˵����c(di��n)��һ��(g��)�S���\(y��n)��(d��ng)��(hu��)��׃��һ��(g��)�S������(bi��o)ԭ�c(di��n)������(li��n)�C(j��)����һ��(g��)�S�\(y��n)��(d��ng)�t����(hu��)��׃��һ��(g��)�S������(bi��o)ԭ�c(di��n)�����ڵĹ��I(y��)�C(j��)���˶��Dz��ô�(li��n)�C(j��)��(g��u)����(li��n)�C(j��)��(g��u)���x���(d��ng)ƽ�_(t��i)�Ͷ�ƽ�_(t��i)ͨ�^���كɂ�(g��)��(d��)�����\(y��n)��(d��ng)����B�ӣ��C(j��)��(g��u)���Ѓɂ�(g��)��ɂ�(g��)�������ɶȣ����Բ�(li��n)��ʽ�(q��)��(d��ng)��һ�N�]�h(hu��n)�C(j��)��(g��u)����(li��n)�C(j��)��(g��u)�Ѓɂ�(g��)��(g��u)�ɲ��֣��քe��������ֱۡ��ֱۻ��(d��ng)�^(q��)��?q��)���?d��ng)���g�кܴ��Ӱ푣��������ǹ��ߺ����w���B�Ӳ��֡��c��(li��n)�C(j��)��������^����(li��n)�C(j��)���˾��Є��ȴY(ji��)��(g��u)��(w��n)�������d��������(d��ng)���ȸߡ��\(y��n)��(d��ng)ؓ(f��)��С�ă�(y��u)�c(di��n)����λ������ϣ���(li��n)�C(j��)���˵��������ף�������ʮ�����y������(li��n)�C(j��)���˄t�෴�����������y������s�dz����ס�
2.�(q��)��(d��ng)ϵ�y(t��ng)
�(q��)��(d��ng)ϵ�y(t��ng)����C(j��)е�Y(ji��)��(g��u)ϵ�y(t��ng)�ṩ��(d��ng)�����b�á�����(j��)��(d��ng)��Դ��ͬ���(q��)��(d��ng)ϵ�y(t��ng)�Ă���(d��ng)��ʽ�֞�Һ��ʽ���≺ʽ��늚�ʽ�͙C(j��)еʽ4�N�����ڵĹ��I(y��)�C(j��)���˲���Һ���(q��)��(d��ng)������Һ��ϵ�y(t��ng)����й¶�����͵��ٲ���(w��n)���Ȇ��}�����ҹ��ʆ�Ԫ���غͰ��F��Ŀǰֻ�д������d�C(j��)���ˡ���(li��n)�ӹ��C(j��)���˺�һЩ���⑪(y��ng)�È�(ch��ng)��ʹ��Һ���(q��)��(d��ng)�Ĺ��I(y��)�C(j��)���ˡ��≺�(q��)��(d��ng)�����ٶȿ졢ϵ�y(t��ng)�Y(ji��)��(g��u)��(ji��n)�Ρ��S���㡢�r(ji��)��͵ȃ�(y��u)�c(di��n)�����ǚ≺�b�õĹ�������(qi��ng)�ͣ�����λ��һ��H���ڹ��I(y��)�C(j��)����ĩ�ˈ�(zh��)�������(q��)��(d��ng)�����(d��ng)��ץ�����D(zhu��n)��͚��(d��ng)���P����ĩ�ˈ�(zh��)�����������С�Сؓ(f��)�ɵĹ���ץȡ���b�䡣����(q��)��(d��ng)��Ŀǰʹ�ö��һ�N�(q��)��(d��ng)��ʽ�������c(di��n)���Դȡ�÷��㣬푑�(y��ng)�죬�(q��)��(d��ng)������̖(h��o)�z�y(c��)�����f��̎�����㣬�����Բ��ö�N�`��Ŀ��Ʒ�ʽ���(q��)��(d��ng)늙C(j��)һ����ò��M(j��n)늙C(j��)���ŷ�늙C(j��)��ĿǰҲ�в���ֱ���(q��)��(d��ng)늙C(j��)��������r(ji��)�^�ߣ�����Ҳ�^���(f��)�s����늙C(j��)����Ĝp����һ������C���p�������[���݆�p�������������X݆�p���������ڲ�(li��n)�C(j��)�������д�����ֱ���(q��)��(d��ng)����ֱ��늙C(j��)�ڲ�(li��n)�C(j��)�����I(l��ng)���ѽ�(j��ng)�õ��ˏV����(y��ng)�á�
3.��֪ϵ�y(t��ng)
�C(j��)���˸�֪ϵ�y(t��ng)�љC(j��)���˸��N��(n��i)����B(t��i)��Ϣ�ͭh(hu��n)����Ϣ����̖(h��o)�D(zhu��n)׃?y��u)�C(j��)�����������ߙC(j��)����֮�g�܉�����͑�(y��ng)�õĔ�(sh��)��(j��)����Ϣ��������Ҫ��֪�c����������B(t��i)���P(gu��n)�ęC(j��)е������λ�ơ��ٶȺ����ȣ�ҕ�X��֪���g(sh��)�ǹ��I(y��)�C(j��)���˸�֪��һ��(g��)��Ҫ���档ҕ�X�ŷ�ϵ�y(t��ng)��ҕ�X��Ϣ���鷴����̖(h��o)�����ڿ����{(di��o)���C(j��)���˵�λ�ú��ˑB(t��i)���C(j��)��ҕ�Xϵ�y(t��ng)߀���|(zh��)���z�y(c��)���R(sh��)�e������ʳƷ�֒������b�ĸ���(g��)����õ��ˏV����(y��ng)�á���֪ϵ�y(t��ng)�Ƀ�(n��i)��������ģ�K���ⲿ������ģ�K�M�ɣ����܂�������ʹ������˙C(j��)���˵ęC(j��)��(d��ng)�ԡ��m��(y��ng)�Ժ����ܻ�ˮƽ��
4. �C(j��)����-�h(hu��n)������ϵ�y(t��ng)
�C(j��)����-�h(hu��n)������ϵ�y(t��ng)�nj�(sh��)�F(xi��n)�C(j��)�����c�ⲿ�h(hu��n)���е��O(sh��)���(li��n)ϵ�ͅf(xi��)�{(di��o)��ϵ�y(t��ng)���C(j��)�����c�ⲿ�O(sh��)�伯�ɞ�һ��(g��)���܆�Ԫ����ӹ������Ԫ�����ӆ�Ԫ���b���Ԫ�ȡ���(d��ng)ȻҲ�����Ƕ��_(t��i)�C(j��)���˼��ɞ�һ��(g��)ȥ��(zh��)�Џ�(f��)�s�΄�(w��)�Ĺ��܆�Ԫ��
5.�˙C(j��)����ϵ�y(t��ng)
�˙C(j��)����ϵ�y(t��ng)�����c�C(j��)�����M(j��n)��(li��n)ϵ�ͅ��c�C(j��)���˿��Ƶ��b�á����磺Ӌ(j��)��C(j��)�Ę�(bi��o)��(zh��n)�K�ˡ�ָ������_(t��i)����Ϣ�@ʾ�塢Σ�U(xi��n)��̖(h��o)��(b��o)�����ȡ� [3]
6.����ϵ�y(t��ng)
����ϵ�y(t��ng)���΄�(w��)�Ǹ���(j��)�C(j��)���˵����I(y��)ָ���Լ��Ă���������������̖(h��o)��֧��C(j��)���˵Ĉ�(zh��)�ЙC(j��)��(g��u)ȥ���Ҏ(gu��)�����\(y��n)��(d��ng)���ܡ�����C(j��)���˲��߂���Ϣ�����������t���_�h(hu��n)����ϵ�y(t��ng)���߂���Ϣ�����������t���]�h(hu��n)����ϵ�y(t��ng)������(j��)����ԭ���ɷ֞�������ϵ�y(t��ng)���m��(y��ng)�Կ���ϵ�y(t��ng)���˹����ܿ���ϵ�y(t��ng)������(j��)�����\(y��n)��(d��ng)����ʽ�ɷ֞��c(di��n)λ���ƺ��B�m(x��)܉�E���ơ�
�ڹ��I(y��)���a(ch��n)�У�������b����һ���������Ĺ�������Ҫ�����Ąڄ�(d��ng)��������(j��ng)�������b����?y��n)���e(cu��)�ʸߣ�Ч�ʵͶ���u�����I(y��)�C(j��)���˴��档�b��C(j��)���˵��аl(f��)���Y(ji��)���˶�N���g(sh��)������ͨӍ���g(sh��)���Ԅ�(d��ng)���ơ���W(xu��)ԭ������Ӽ��g(sh��)�ȡ��аl(f��)�ˆT����(j��)�b�����̣��������m�ij���(y��ng)���ھ��w���b�乤�����b��C(j��)���˵Ĵ����c(di��n)�����ǰ��b���ȸߡ��`���Դ����ó̶ȸߡ���?y��n)��b�乤����(f��)�s����(x��)�������҂��x���b��C(j��)���ˁ��M(j��n)������������܇����(x��)�����İ��b��
ؐ���R1�Sģ�K
8EI013HWS10.XXXX-1
8EI017HWS10.XXXX-1
8EI1X6HWS10.XXXX-1
8EI1X6MWS10.XXXX-1
8EI2X2HWS10.XXXX-1
8EI2X2MWS10.XXXX-1
8EI4X5HWS10.XXXX-1
8EI4X5MWS10.XXXX-1
8EI8X8HWS10.XXXX-1
8EI8X8MWS10.XXXX-1
ؐ���RACOPOS multi
ؐ���R��׃ģ�K�����Sģ�K��
ؐ���R���(n��i)���b
8BVI0014HWS0.000-1
8BVI0028HWS0.000-1
8BVI0055HWS0.000-1
8BVI0110HWS0.000-1
8BVI0220HWS0.000-1
8BVI0330HWS0.000-1
8BVI0440HWS0.000-1
8BVI0660HWS0.000-1
8BVI0880HWS0.004-1
8BVI1650HWS0.000-1
ؐ���R��s���ʽ���b
8BVI0014HCS0.000-1
8BVI0028HCS0.000-1
8BVI0055HCS0.000-1
8BVI0110HCS0.000-1
8BVI0220HCS0.000-1
8BVI0330HCS0.000-1
8BVI0440HCS0.000-1
8BVI0660HCS0.000-1
8BVI0880HCS0.004-1
8BVI1650HCS0.000-1
ؐ���R��׃ģ�K��SafeMOTION�����Sģ�K��
ؐ���R���(n��i)���b
8BVI0014HWSA.000-1
8BVI0014HWSS.000-1
8BVI0028HWSA.000-1
8BVI0028HWSS.000-1
8BVI0055HWSA.000-1
8BVI0055HWSS.000-1
8BVI0110HWSA.000-1
8BVI0110HWSS.000-1
8BVI0220HWSA.000-1
8BVI0220HWSS.000-1
8BVI0330HWSA.000-1
8BVI0330HWSS.000-1
8BVI0440HWSA.000-1
8BVI0440HWSS.000-1
8BVI0660HWSA.000-1
8BVI0660HWSS.000-1
8BVI0880HWSA.004-1
8BVI0880HWSS.004-1
8BVI1650HWSS.000-1
ؐ���R��s���ʽ���b
8BVI0014HCSA.000-1
8BVI0014HCSS.000-1
8BVI0028HCSA.000-1
8BVI0028HCSS.000-1
8BVI0055HCSA.000-1
8BVI0055HCSS.000-1
8BVI0110HCSA.000-1
8BVI0110HCSS.000-1
8BVI0220HCSA.000-1
8BVI0220HCSS.000-1
8BVI0330HCSA.000-1
8BVI0330HCSS.000-1
8BVI0440HCSA.000-1
8BVI0440HCSS.000-1
8BVI0660HCSA.000-1
8BVI0660HCSS.000-1
8BVI0880HCSA.004-1
8BVI0880HCSS.004-1
8BVI1650HCSS.000-1
ؐ���R��׃ģ�K���p�Sģ�K��
ؐ���R���(n��i)���b
8BVI0014HWD0.000-1
8BVI0028HWD0.000-1
8BVI0055HWD0.000-1
8BVI0110HWD0.000-1
8BVI0220HWD0.000-1
ؐ���R��s���ʽ���b
8BVI0014HCD0.000-1
8BVI0028HCD0.000-1
8BVI0055HCD0.000-1
8BVI0110HCD0.000-1
8BVI0220HCD0.000-1
ؐ���R��׃ģ�K��SafeMOTION���p�Sģ�K��
ؐ���R���(n��i)���b
8BVI0014HWDS.000-1
8BVI0028HWDS.000-1
8BVI0055HWDS.000-1
8BVI0110HWDS.000-1
8BVI0220HWDS.000-1
ؐ���R��s���ʽ���b
8BVI0014HCDS.000-1
8BVI0028HCDS.000-1
8BVI0055HCDS.000-1
8BVI0110HCDS.000-1
8BVI0220HCDS.000-1
ؐ���RACOPOS remote
ؐ���R�Ӿ���
8CVE28000HC00.00-1
ؐ���R��׃ģ�K
8CVI045E1HCS0.00-1
8CVI045H1HCS0.00-1
8CVI045S1HCS0.00-1
8CVI088E1HCS0.00-1
8CVI088H1HCS0.00-1
8CVI088S1HCS0.00-1
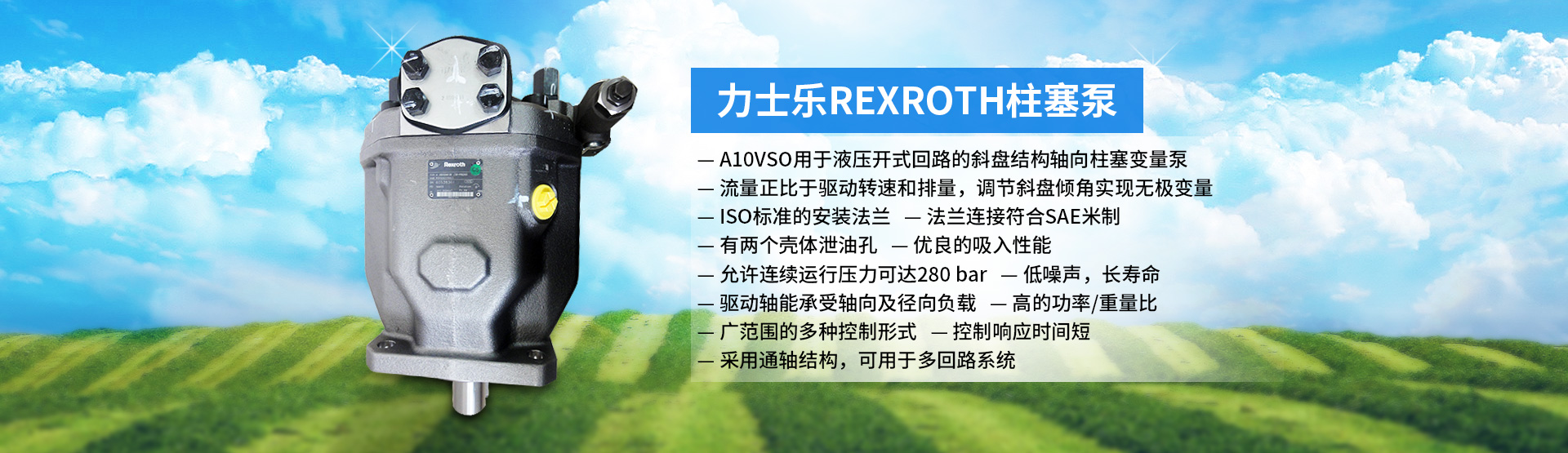
ACOPOS
�����ŷ��(q��)��(d��ng)��
����ACOPOSϵ���ŷ��(q��)��(d��ng)�����^�ߵľ������Ӯa(ch��n)�����ӿ����a(ch��n)���ڲ�����|(zh��)���ɞ�F(xi��n)��(sh��)��
�������ŷ��(q��)��(d��ng)�O(sh��)Ӌ(j��)
ACOPOS�ŷ��(q��)��(d��ng)ϵ����ؐ���R�Ԅ�(d��ng)����Q�����е�һ��(g��)��Ҫ�M�ɲ��֡�ᘌ�(du��)�ИI(y��)�Č��ù����Լ�ֱ�^�Ĺ����ǿs���_�l(f��)�r(sh��)�g��ǰ�ᡣ
�u(p��ng)�r(ji��)�Ԅ�(d��ng)����Q������һ��(g��)��Ҫ������(bi��o)��(zh��n)���ڑ�(y��ng)�ó���������a(ch��n)�^�̰l(f��)��˲׃�r(sh��)�ȿ����ֵخa(ch��n)���¼�푑�(y��ng)��ACOPOS�ŷ��(q��)��(d��ng)�߂��@һ���ԣ������\(y��n)�Еr(sh��)����r(sh��)�g�dz�����ͨ��ѭ�h(hu��n)���ڃH400μs������ѭ�h(hu��n)�H50μs��
��Ʒ�|(zh��)������(qi��ng)���Ҳ�����ȫ
�ڹ��I(y��)�h(hu��n)����Ҫ���C���_�����ͱ�횳����ҕ늴ż���EMC�����˘�(bi��o)��(zh��n)��Ҏ(gu��)���Ĝy(c��)ԇ���⣬߀����ڐ��ӵĭh(hu��n)�����M(j��n)�ЬF(xi��n)��(ch��ng)�y(c��)ԇ���y(c��)ԇ�Y(ji��)������C�����ڌ�(sh��)�(y��n)�Һ͌�(sh��)�H�����Ѓ�(y��u)���Ĝy(c��)ԇָ��(bi��o)���O(sh��)����߀��(n��i)����CEָ��Ҏ(gu��)���ĞV������
Ӌ(j��)��C(j��)�o��ģ���\(y��n)���ќy(c��)��������͜ض��A(y��)�y(c��)������(g��)ϵ�y(t��ng)�ğ��ܡ��Ķ���(sh��)�F(xi��n)��ϵ�y(t��ng)���ܡ�
ACOPOS�ŷ��(q��)��(d��ng)��(hu��)�õ�늙C(j��)Ƕ��ʽ����(sh��)оƬ�ϵ���Ϣ���@Щ��Ϣ�������P(gu��n)�ęC(j��)�һ�w����(sh��)��(j��)����˲�����Ҫ����(f��)�����׳��e(cu��)���˹��O(sh��)�Å���(sh��)������(d��ng)�r(sh��)�gҲ���p�١��ھS�o(h��)���g���ṩ���P(gu��n)�ı�Ҫ��(sh��)��(j��)�����ٶ�λ�¹�ԭ��
ACOPOS�ŷ�ϵ��Ҳ�ṩ������Ϳ�ӵ��·�塣�@Щ�a(ch��n)Ʒ������ͬ��Ҏ(gu��)���ڷ��m�������ȭh(hu��n)��Ӱ��¸��ӏ�(qi��ng)��
ģ�K�����Ժͳ���(qi��ng)��ͨ������
��Ҫ��I/O�c(di��n)��(sh��)��ACOPOS�ŷ��(q��)��(d��ng)��(bi��o)��(zh��n)�O(sh��)���е�һ���֣����ڲ���һ��(g��)�ŷ��S���Ñ��ڈ�(zh��)�и߾��Ȝy(c��)������ӡ��(bi��o)���Ƶ��΄�(w��)�r(sh��)���ṩ2��(g��)�|�l(f��)ʽݔ�롣
�M(j��n)һ������ACOPOS�ŷ��(q��)��(d��ng)�r(sh��)��ʹ�ò���ģ�K�M���ض��đ�(y��ng)��������ʽģ�K�����B�ӾW(w��ng)�j(lu��)���������(q��)��(d��ng)�������������@ʾ�O(sh��)�䣬Ҳ�����B�Ӿ��a�����������͈�(zh��)�ЙC(j��)��(g��u)�����⣬���������(q��)��(d��ng)���ɵ�CPUģ�KҲ�����ڻ����(q��)��(d��ng)���Ԅ�(d��ng)����
����Ą�(chu��ng)�¿��g
ACOPOS�ŷ��(q��)��(d��ng)���������ИI(y��)�õ��˳ɹ��đ�(y��ng)�ã�չʾ���䄓(chu��ng)�µ��O(sh��)Ӌ(j��)������ӡ����̵Ą�(chu��ng)�������Ñ��Ѻõ����ܺ��ܡ�
���b�ИI(y��)
�C(j��)е�ּ��g(sh��)
�����ИI(y��)
�켈ӡˢ�ИI(y��)
�����ИI(y��)
ľ�ļӹ��ИI(y��)
���ټӹ��ИI(y��)
��Ӱ댧(d��o)�w�ИI(y��)